[1]:
%matplotlib inline
import numpy as np
import scipy as sp
from scipy.linalg import expm
import matplotlib.pyplot as plt
[2]:
import sys
sys.path.append('../../')
import SpringMassDamper
import dmdlab
from dmdlab import DMD, DMDc, delay_embed, plot_eigs, cts_from_dst
[3]:
color = plt.rcParams['axes.prop_cycle'].by_key()['color'] # store color array
Ex 1: Sinusoid¶
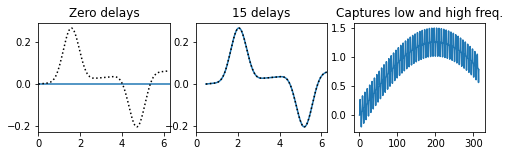
Here we show off the importance of delay embeddings.
If a real-valued operator A doesn’t have sufficient dimensionality, then it cannot produce the necessary complex conjugate pair of roots required to produce oscillatory time dynamics. For example, suppose we are measuring a 1D sine wave. The DMD operator A would have only one real root. The operator must be augmented to capture the oscillation.
[4]:
fig, axes = plt.subplots(1, 3, figsize=[8,2])
fig.subplots_adjust(hspace=2)
ts = np.linspace(0,2*np.pi, 200)
data = np.sin(1e-2*ts) + 0.25*np.sin(ts)**7 # powers -> add'l freq for each extra power
data = data.reshape(1,-1)
# 1 - Regular DMD
model = DMD.from_full(data, ts)
axes[0].set_title('Zero delays')
axes[0].plot(ts, model.predict_dst(ts)[0].real, c=color[0])
axes[0].plot(model.orig_timesteps, model.X1[0], ls=':', c='k')
axes[0].set_xlim([0,2*np.pi])
# 2- Delay embed
shift = 15 # shift + 1 is number of eigenvalues (2*7 + 2)
ts1 = ts[shift:]
model = DMD.from_full(delay_embed(data, shift), ts[shift:])
axes[1].set_title('{} delays'.format(shift))
axes[1].plot(ts1, model.predict_dst(ts1)[0].real, c=color[0])
axes[1].plot(model.orig_timesteps, model.X1[0], ls=':', c='k')
axes[1].set_xlim([0,2*np.pi])
# plot long times (captures low frequency, too)
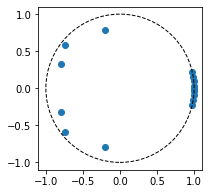
axes[2].set_title('Captures low and high freq.')
ts = np.linspace(ts1[0],1e2*np.pi, 1000)
axes[2].plot(ts, model.predict_dst(ts)[0].real, c=color[0])
# toss in an eigenvalue plot at the end
plot_eigs(model.eigs, figsize=[4,3]);
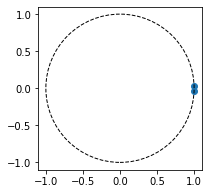
Keeping with sine, let’s address the addition of noise and the importance of thresholding.
[5]:
fig, ax = plt.subplots(1,1, figsize=[5,3])
ts = np.linspace(0,2*np.pi, 200)
data = np.sin(ts) + .1*np.random.randn(len(ts))
data = data.reshape(1,-1)
# 2- Delay embed
shift = 25
ts1 = ts[shift:]
model = DMD.from_full(delay_embed(data, shift), ts[shift:], threshold=2, threshold_type='count')
ax.plot(ts1, model.predict_dst(ts1)[-1].real, c=color[0], label='Prediction')
ax.plot(ts, data[0], ls=':', c='k', label='Data')
ax.set_xlim([0,2*np.pi])
ax.legend()
plot_eigs(model.eigs, figsize=[5,3]);
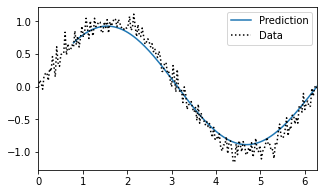
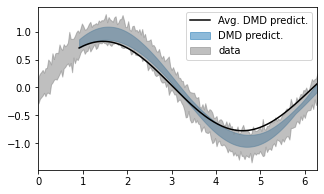
Use the average DMD operator to correct for noisey errors.
[6]:
dmdA_list = []
data_list = []
predict_list = []
for aModel in range(50):
ts = np.linspace(0,2*np.pi, 200)
data = np.sin(ts) + .1*np.random.randn(len(ts))
data_list.append(data)
data = data.reshape(1,-1)
# 2- Delay embed
shift = 29
model = DMD.from_full(delay_embed(data, shift), ts[shift:], threshold=2, threshold_type='count')
predict_list.append(model.predict_dst(ts[shift:])[-1].real)
dmdA_list.append(model.A)
data_list = np.array(data_list)
predict_list = np.array(predict_list)
A = np.mean(dmdA_list,axis=0)
ctsA, _ = cts_from_dst(A, np.zeros_like(A), ts[1]-ts[0])
A_predict = [(expm(ctsA*t)@model.X1[:,0]).real[0] for t in ts[shift:]]
fig, ax = plt.subplots(1,1, figsize=[5,3])
ax.plot(ts[shift:], A_predict, c='k', label='Avg. DMD predict.')
ax.fill_between(ts[shift:], np.min(predict_list, axis=0), np.max(predict_list, axis=0),
alpha=0.5, color=color[0], label='DMD predict.')
ax.fill_between(ts, np.min(data_list, axis=0), np.max(data_list, axis=0),
alpha=0.5, color='gray', label='data')
ax.legend()
ax.set_xlim([0,2*np.pi])
[6]:
(0.0, 6.283185307179586)
Ex 2: Spring-Mass-Damper¶
We’ll show how DMD works with a physical system where we have intuition for forcing.
[7]:
# Initialize system
smd = SpringMassDamper.spring_mass_damper({'mass': 10, 'spring': 1, 'damper': 1})
y0 = np.array([0, 2]) # kick it
# Choose times (these are universally used throughout this section for the control pulse)
t_span = [0,100]
dt = .1
ts = np.linspace(*t_span, 1000)
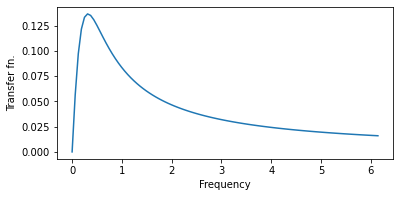
First, compute the transfer function for a linear state space system under forcing. We’ll plot the transfer function to find interesting frequencies by inspection
[8]:
# Transfer function for a linear state space system
G = lambda s: np.linalg.inv(s%(2*np.pi)*np.identity(2)-smd.A)@smd.B
fig, ax = plt.subplots(1, figsize=[6,3])
fig.tight_layout(rect=[0.05,0.05,.95,.95])
freq = np.linspace(0, 43/7, 100)
ax.plot(freq, [G(s)[1] for s in freq])
ax.set_xlabel('Frequency')
ax.set_ylabel('Transfer fn.')
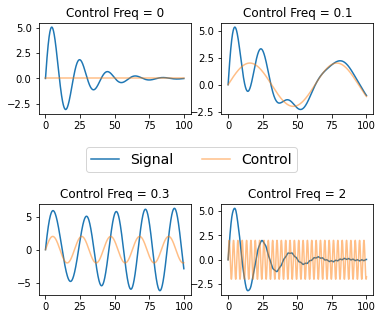
# Plot some frequencies
fig, axes = plt.subplots(2,2,figsize=[6,5])
fig.subplots_adjust(hspace=1)
for ax, freq in zip(axes.flatten(), [0,.1,.3,2]):
# Run simulation
smd.set_control(ts, 2*np.sin(freq*ts))
res = smd.simulate(y0, t_span, dt, True)
# Plot result
ax.set_title('Control Freq = {}'.format(freq))
ax.plot(smd.t, smd.x)
ax.plot(smd.t, smd.u(smd.t), alpha=0.5)
fig.legend(['Signal', 'Control'], fontsize=14, loc='center', ncol=2)
[8]:
<matplotlib.legend.Legend at 0x7f46fa8884a8>
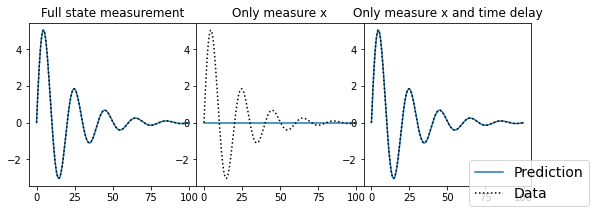
Let’s look at the SMD without any external forcing. This example will show how time delays are similar to including a measured derivative term. (From left to right, we have DMD default, DMD only measuring position, and DMD with a time delay to capture position and it’s derivative).
[9]:
fig, axes = plt.subplots(1,3, figsize=[9,3])
fig.subplots_adjust(wspace=0)
omega = 0 # no control
smd.set_control(ts, 2*np.sin(omega*ts))
res = smd.simulate(y0, t_span, dt, True)
# Default
model = DMD.from_full(res.y, res.t)
axes[0].plot(model.orig_timesteps, model.predict_dst()[0].real, c=color[0])
axes[0].plot(model.orig_timesteps, model.X1[0], ls=':', c='k')
axes[0].set_title('Full state measurement')
# Only measure x:
model = DMD.from_full(res.y[0,:].reshape(1,-1), res.t)
axes[1].plot(model.orig_timesteps, model.predict_dst()[0].real, c=color[0])
axes[1].plot(model.orig_timesteps, model.X1[0], ls=':', c='k')
axes[1].set_title('Only measure x')
# Only measure x and time-delay
s = 1
model = DMD.from_full(delay_embed(res.y[0,:].reshape(1,-1), s), res.t[s:])
axes[2].plot(model.orig_timesteps, model.predict_dst()[-2].real, c=color[0])
axes[2].plot(ts, res.y[0], ls=':', c='k')
axes[2].set_title('Only measure x and time delay')
fig.legend(['Prediction', 'Data'], fontsize=14, loc='lower right', ncol=1)
[9]:
<matplotlib.legend.Legend at 0x7f46f51dea58>
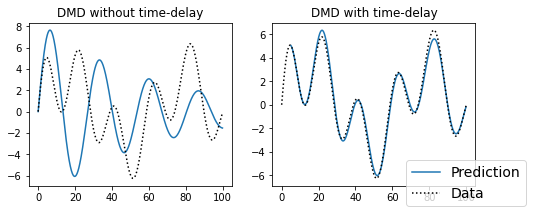
Next, let’s just inspect an example where the control is nonlinear. Can we capture the dynamics with regular DMD? Yes, if we time-delay enough.
[10]:
smd.set_control(ts, 4*np.sin(0.1*ts)**3) # weird non-linear forcing
res = smd.simulate(y0, t_span, dt, True)
fig, axes = plt.subplots(1,2,figsize=[8,3])
model = DMD.from_full(res.y, res.t)
# Ironically, the best fit linear operator looks like the underlying dynamics.
axes[0].plot(model.orig_timesteps, model.predict_dst()[-2].real, c=color[0])
axes[0].plot(ts, res.y[0], ls=':', c='k')
axes[0].set_title('DMD without time-delay')
# Delay embed to capture extra control frequencies? Needs a bunch...
# Usage note: Be sure to take the last rows of the model prediction--these use the past delays
# to predict the future (as opposed to the opposite for the first rows).
s = 50
model = DMD.from_full(delay_embed(res.y, s), res.t[s:])
axes[1].plot(model.orig_timesteps, model.predict_dst()[-2].real, c=color[0])
axes[1].plot(ts, res.y[0], ls=':', c='k')
axes[1].set_title('DMD with time-delay')
fig.legend(['Prediction', 'Data'], fontsize=14, loc='lower right', ncol=1)
[10]:
<matplotlib.legend.Legend at 0x7f46f4c6ea20>
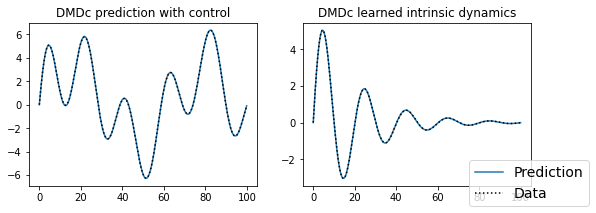
Now let’s have DMDc go to work on the same data. No time-delays needed and we get the underlying dynamics. Compare this result to the previous one without DMDc.
[11]:
fig, axes = plt.subplots(1,2,figsize=[9,3])
Ups = (4*np.sin(0.1*ts)**3).reshape(1,-1) # weird non-linear forcing
smd.set_control(ts, Ups)
res = smd.simulate(y0, t_span, dt, True)
X = res.y
model = DMDc.from_full(X, Ups, ts)
axes[0].plot(model.orig_timesteps, model.predict_dst()[-2], c=color[0])
axes[0].plot(ts, res.y[0], ls=':', c='k')
axes[0].set_title('DMDc prediction with control')
smd.set_control(ts, np.zeros_like(ts))
res0 = smd.simulate(y0, t_span, dt, True)
axes[1].plot(model.orig_timesteps, model.predict_dst(model.zero_control())[-2].real, c=color[0])
axes[1].plot(res0.t, res0.y[0], ls=':', c='k')
axes[1].set_title('DMDc learned intrinsic dynamics')
fig.legend(['Prediction', 'Data'], fontsize=14, loc='lower right', ncol=1)
print('Equal dynamics? ' + str(np.allclose(model.A, sp.linalg.expm(smd.A*dt), atol=1e-3)))
Equal dynamics? True
[ ]: